|
AutoAPMS
Streamlining behaviors in ROS 2
|
|
AutoAPMS
Streamlining behaviors in ROS 2
|
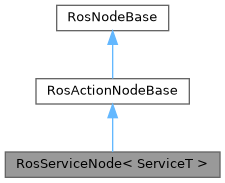
Generic behavior tree node wrapper for a ROS 2 service client. More...
#include <auto_apms_behavior_tree_core/node/ros_service_node.hpp>
Public Member Functions | |
| RosServiceNode (const std::string &instance_name, const Config &config, Context context) | |
| Constructor. | |
| virtual bool | setRequest (typename Request::SharedPtr &request) |
| Set the request to be sent to the ROS 2 service. | |
| virtual BT::NodeStatus | onResponseReceived (const typename Response::SharedPtr &response) |
| Callback invoked after the service response was received. | |
| virtual BT::NodeStatus | onFailure (ServiceNodeErrorCode error) |
| Callback invoked when one of the errors in ServiceNodeErrorCode occur. | |
| bool | createClient (const std::string &service_name) |
| Create the client of the ROS 2 service. | |
| std::string | getServiceName () const |
| Get the name of the service this node connects with. | |
Static Public Member Functions | |
| static BT::PortsList | providedBasicPorts (BT::PortsList addition) |
| ADerived nodes implementing the static method RosServiceNode::providedPorts may call this method to also include the default port for ROS 2 behavior tree nodes. | |
| static BT::PortsList | providedPorts () |
| If a behavior tree requires input/output data ports, the developer must define this method accordingly. | |
Additional Inherited Members | |
 Protected Member Functions inherited from RosNodeBase Protected Member Functions inherited from RosNodeBase | |
| void | applyPortAliasing (const BT::TreeNode *node) const |
| Support the node manifest 'port_alias' feature: copy the aliased port values onto the original ports the node implementation reads. | |
| template<typename InstanceT> | |
| std::shared_ptr< InstanceT > | getSharedEntity (const std::string &entity_name, const std::function< std::shared_ptr< InstanceT >()> &factory) |
Retrieve a process-wide shared ROS 2 entity, creating it via factory on first use. | |
Generic behavior tree node wrapper for a ROS 2 service client.
When ticked, this node sends a service request and awaits the response asynchronously. Inheriting classes must reimplement the virtual methods as described below.
By default, the name of the service will be determined as follows:
topic, use that.It is possible to customize which port is used to determine the service name and also extend the input's value with a prefix or suffix. This is achieved by including the special pattern (input:<port_name>) in NodeRegistrationOptions::topic and replacing <port_name> with the desired input port name.
Example: Given the user implements an input port BT::InputPort<std::string>("my_port"), one may create a client for the service "foo/bar" by defining NodeRegistrationOptions::topic as (input:my_port)/bar and providing the string "foo" to the port with name my_port.
Additionally, the following characteristics depend on NodeRegistrationOptions:
true, a warning is logged. Otherwise, an exception is raised.| ServiceT | Type of the ROS 2 service. |
Definition at line 91 of file ros_service_node.hpp.
|
inlineexplicit |
Constructor.
Derived nodes are automatically created by TreeBuilder::instantiate when included inside a node manifest associated with the behavior tree resource.
| instance_name | Name given to this specific node instance. |
| config | Structure of internal data determined at runtime by BT::BehaviorTreeFactory. |
| context | Additional parameters specific to ROS 2 determined at runtime by TreeBuilder. |
Definition at line 219 of file ros_service_node.hpp.
|
inlinestatic |
ADerived nodes implementing the static method RosServiceNode::providedPorts may call this method to also include the default port for ROS 2 behavior tree nodes.
| addition | Additional ports to add to the ports list. |
Definition at line 132 of file ros_service_node.hpp.
|
inlinestatic |
If a behavior tree requires input/output data ports, the developer must define this method accordingly.
Definition at line 143 of file ros_service_node.hpp.
|
inlinevirtual |
Set the request to be sent to the ROS 2 service.
The node may deny to query a service call by returning false. Otherwise, this method should return true.
By default, this callback returns true.
| request | Request message. |
false if the request should not be sent. In that case, onFailure(INVALID_REQUEST) will be called. Definition at line 346 of file ros_service_node.hpp.
|
inlinevirtual |
Callback invoked after the service response was received.
Based on the response, the node may return BT::NodeStatus::SUCCESS or BT::NodeStatus::FAILURE.
By default, this callback always returns BT::NodeStatus::SUCCESS.
| response | Response message. |
Definition at line 352 of file ros_service_node.hpp.
|
inlinevirtual |
Callback invoked when one of the errors in ServiceNodeErrorCode occur.
Based on the error code, the node may return BT::NodeStatus::SUCCESS or BT::NodeStatus::FAILURE.
By default, this callback throws auto_apms_behavior_tree::exceptions::RosNodeError and interrupts the tree.
| error | Code for the error that has occurred. |
Definition at line 358 of file ros_service_node.hpp.
|
inline |
Create the client of the ROS 2 service.
| service_name | Name of the service. |
true if the client was created successfully, false otherwise. Definition at line 367 of file ros_service_node.hpp.
|
inline |
Get the name of the service this node connects with.
Definition at line 410 of file ros_service_node.hpp.